This is a simpler version of the voronoi based method for drivetime isochrones. It uses a single location as center.
Angle should be in the range 0 to 45, with 0 giving the convex hull. Small values make the isochrone follow the network more closely and larger values makes it closer to the convex hull.
Smoothing can be enabled, but may give degenerate results when combined with multiple steps.
If IncludeLinks is false, only the nodes of the network is used when generating the output.
Much faster, but also less accurate.
Syntax: DriveTimeSimpleDyn(filename: string; GF: TGISformat; location: TLocation; Steps: TStepList; angle: double; doughnut, IncludeLinks: boolean);
See also Isochrones - overview
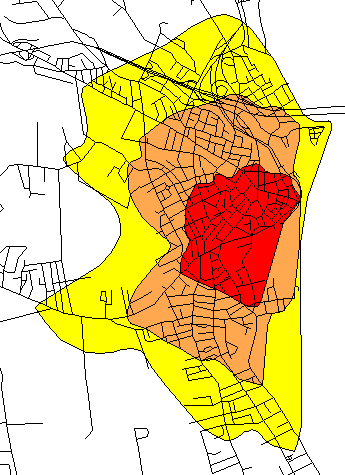
Example with 1-2-3 km, angle = 3 degree, doughnut = true and smoothing = (5,3,5):